GSIS特邀论文 | 嫦娥三号和嫦娥四号月球车任务的地理空间技术

以下文章来源于地球空间信息科学学报GSIS ,作者编辑部
地球空间信息科学学报GSIS
武汉大学《地球空间信息科学学报》 Geo-spatial Information Science (GSIS)官方账号
↑ 点击上方「中国测绘学会」
可快速关注我们
“
北京时间12月17日1时59分,探月工程嫦娥五号返回器在内蒙古四子王旗预定区域成功着陆,标志着中国首次地外天体采样返回任务圆满完成。
”
中国探月工程是《国家中长期科学和技术发展规划纲要(2006-2020年)》明确的国家科技重大专项标志性工程,自2004年1月立项并正式启动以来,已连续成功实施嫦娥一号、嫦娥二号、嫦娥三号、再入返回飞行试验和嫦娥四号等五次任务。
2007年,嫦娥一号成功获取了中国第一幅全月球影像图;
2010年,嫦娥二号作为先导星,为嫦娥三号的落月探测进行多项技术验证;
2013年,嫦娥三号在月面着陆,让中国成为世界上第三个实现地外天体软着陆的国家;
2014年,探月工程三期再入返回试验器为后续的嫦娥五号验证了“打水漂”再入返回技术。
2018年,嫦娥四号中继星“鹊桥”发射升空,为嫦娥四号提供中继通信服务。
2019年,嫦娥四号实现了人类历史上的首次月球背面软着陆。
探索浩瀚宇宙是共同梦想,和平利用太空是共同理念。从人类航天史的角度审视,中国的月球、火星乃至更远的行星探测计划,都是地球文明向外太空探索乐章中不可缺少的部分。
为此,GSIS特邀中国科学院遥感与数字地球研究所邸凯昌研究员撰写论文Geospatial technologies for Chang’e-3 and Chang’e-4 lunar rover missions,介绍了嫦娥四号月球探测器的研制和应用情况。包括利用摄影测量测绘技术生成的具有米级分辨率的着陆场地形产品,和着陆后实时生成厘米级分辨率的地形产品等。
邸凯昌研究员还参加了嫦娥五号工程任务,他带领的中科院空天信息创新研究院遥感科学国家重点实验室行星遥感团队研发了视觉定位与制图技术与软件,在北京航天飞行控制中心应用于遥操作任务,团队成员全程在飞控中心参加任务运行,在预选着陆区制图、着陆点定位、采样区地形分析、采样罐定位等方面做出了重要贡献,为采样返回任务的成功实施提供了有力支撑。
科技自立自强的旋律最为动听。嫦娥系列代表着中国航天自主创新道路的新成就,地理空间技术为嫦娥怎么走,带回什么提供了强有力的技术支撑。只有通过独立自主的探索攻关,一直秉持科技自立自强的信心,才能谱写出壮美的乐章,奏响向航天强国迈进的铿锵华音。
扫描上方二维码可阅读、下载本篇论文。
引用本文:
Di, Kaichang,Liu, Zhaoqin,Wan, Wenhui,Peng, Man,Liu, Bin,Wang, Yexin,Gou, Sheng,Yue, Zongyu (2020) Geospatial technologies for Chang’e-3 and Chang’e-4 lunar rover missions, Geo-spatial Information Science, 23:1, doi: 10.1080/10095020.2020.1718002
以下为论文主要研究内容:
利用摄影测量测绘技术,在着陆前利用轨道影像生成具有米级分辨率的着陆场地形产品,并在着陆后实时生成厘米级分辨率的地形产品。
在着陆后立即使用下降图像和轨道底图,利用视觉定位技术确定两个着陆器的位置。
在地面作业期间,基于视觉定位的月球车定位是在每个航路点使用导航摄像头图像进行的。地形分析和月球车定位结果直接支持航路点到航路点的路径规划、科学目标选择和科学研究。
开发了基于GIS的数字地图制图系统,支持移动机器人遥操作。
作者简介
邸凯昌 中国科学院遥感与数字地球研究所(RADI)教授。他的研究兴趣包括行星摄影测量和遥感、视觉定位和导航以及行星科学。他是国际摄影测量和遥感学会委员会间第三/第二工作组“行星遥感和制图”的现任主席。
Kaichang Di is a professor at Institute of Remote Sensing and Digital Earth (RADI), Chinese Academy of Sciences. His research interests include planetary photogrammetry and remote sensing, visual localization and navigation, and planetary science. He is currently the chair of Inter-Commission Working Group III/II “Planetary Remote Sensing and Mapping” of International Society for Photogrammetry and Remote Sensing.
刘召芹 中国科学院遥感与数字地球研究所(RADI)副教授。研究方向为行星制图和行星GIS。
Zhaoqin Liu is an associate professor at RADI. His research interests include planetary mapping, and planetary GIS.
万文辉 中国科学院遥感与数字地球研究所(RADI)助理教授。研究方向为视觉定位与机器人导航。
Wenhui Wan is an assistant professor at RADI. His research interests include visual localization and robot navigation,
彭嫚 中国科学院遥感与数字地球研究所(RADI)副教授。研究方向为行星摄影测量和地形分析。
Man Peng is an associate professor at RADI. Her research interests include planetary photogrammetry, and topographic analysis.
刘斌 中国科学院遥感与数字地球研究所(RADI)副教授。研究方向为轨道影像的几何建模和高精度地形测绘。
Bin Liu is an associate professor at RADI. His research interests include geometric modeling orbital imagery, and high-precision topographic mapping.
王晔昕 中国科学院遥感与数字地球研究所(RADI)副教授。研究方向为行星制图和目标识别。
Yexin Wang is an associate professor at RADI. Her research interests include planetary mapping and target recognition.
芶盛 中国科学院遥感与数字地球研究所(RADI)助理教授。研究方向为利用高光谱数据对行星矿物进行反演以及行星地质学。
Sheng Gou is an assistant professor at RADI. His research interests include planetary mineral retrieval using hyperspectral data, and planetary geology.
岳宗玉 中国科学院遥感与数字地球研究所(RADI)教授。研究方向为行星遥感和行星科学。
Zongyu Yue is a professor at RADI. His research interests include planetary remote sensing and planetary science.
前沿观点
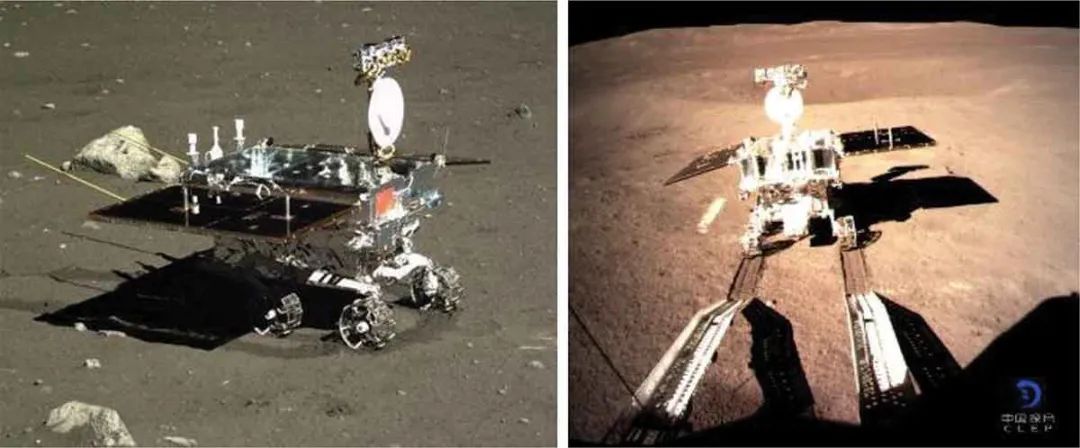
“嫦娥三号(CE-3)探测器,包括一个着陆器和一个月球车,于2013年12月14日成功降落在月球北部的沼泽地。玉兔号探测器于12月15日被释放到月球表面并开始表面探测。
Chang’e-3 (CE-3) probe, including a lander and a rover, successfully landed in northern Mare Imbrium of the moon on 14 December 2013 The Yutu (Jade Rabbit) rover was released to the lunar surface and began surface exploration on December 15.
“CE-4的成功标志着人类航天器首次在月球远端软着陆,并为月球上最古老和最大的撞击盆地SPA盆地的原位探测提供了独特的机会。
The success of CE-4 marks the first soft landing of human spacecraft on the far side of the moon and provides a unique opportunity for in-situ exploration of the SPA basin which is the oldest and largest impact basin on the moon.
“在CE-3和CE-4月球车任务中,地理空间技术被广泛用于支持着陆点的各种科学研究,并支持任务操作,如地形测绘、危险检测、路径规划、月球车定位和导航等。
In CE-3 and CE-4 lunar rover missions, geospatial technologies were extensively used to support various scientific studies of the landing sites, and to support mission operations such as topographic mapping, hazard detection, path planning, rover localization and navigation, etc.
“在两次月球车任务中,使用导航摄像机图像,在月球车横移的每个航路点处,自动生成分辨率为0.02米的局部DEM和DOM。这些地图对于支持危险分析和月球车路径规划至关重要。
In the two rover missions, local DEM and DOM with 0.02-m resolution were automatically produced in near real-time at each waypoint along the rover traverse using Navcam images. These maps were essential to support hazard analysis and rover path planning.
“在月球车导线沿线的一些位置采集了Pancam立体图像,用于现场的科学调查,例如表面特征分析和科学目标选择。探测器拍摄了56对不同方位角和2个仰角的图像,在一个位置形成360°全景图。
Pancam stereo images were acquired at some locations along the rover traverse for scientific investigation of the site, e.g. surface feature analysis and science target selection. The rover took 56 pairs of images with 28 different azimuth angles and 2 elevation angles to form a 360° panorama at one location.
“ 根据Pancam立体图像自动生成三个位置处的三个DEM(0.05网格间距),然后根据视觉定位技术确定的月球车精确位置合并为一个更大的DEM(380×390 m)。图9和图10显示,在更精细的分辨率下,CE-4着陆场的地形崎岖不平,通常东北部高于西南部。该DEM有助于研究冯卡曼陨石坑的地形演化(Di et al.2019b),这对于理解玉兔2月球车测量的地表物质来源具有重要意义(Li et al.2019;Gou et al.2019)。
Three DEMs (0.05-grid spacing) at the three locations were automatically generated from the Pancam stereo images and then were merged into a larger DEM (380 × 390 m) based on accurate locations of the rover determined by the visual localization technique (see section 4.2). Figure 10 shows the merged DEM overlaid on the LROC NAC DOM. Figures 9 and 10 reveal that in finer resolution the terrain of CE-4 landing site is much rugged and is generally higher in the NE than in the SW. This DEM contributed to the study of the topographic evolution of Von Kármán crater (Di et al. 2019b), which is significant to understanding the origin of the surface material measured by Yuyu-2 rover (Li et al. 2019; Gou et al. 2019).
“ CE-3和CE-4着陆器的位置是由无线电跟踪技术初步确定的。为了提高定位精度,着陆器在着陆后立即使用视觉定位技术进行定位。
The locations of CE-3 and CE-4 landers were initially determined by the radio-tracking technique. To improve the positioning accuracy, lander localization was performed in each mission using visual positioning techniques immediately after landing.
“高精度的月球车定位对于月球车路径规划和接近科学目标具有重要意义。车载航位推算系统,包括车轮里程表和惯性测量单元(IMU),实时提供月球车沿导线的初始位置。为了减少由于车轮打滑和惯性测量单元漂移引起的定位误差,通常采用视觉定位技术,即跨站点视觉定位和DOM匹配技术,利用Navcam图像对月球车进行高精度定位。
Localization of the rover with high accuracy is important for rover path planning and approaching science targets. The onboard dead-reckoning system, including wheel odometer and Inertial Measurement Unit (IMU), provides the initial locations of the rover along the traverse in real time. To reduce the localization error caused by wheel slippage and IMU drift, visual positioning techniques, namely cross-site visual localization and DOM matching, have been routinely applied to localize the rover with high accuracy using the Navcam images.
“这个基于地理信息系统的软件系统的主要目的是使用在月球车任务之前和期间获得或导出的多源数据制作和发布标准化地图。它包括三个模块:(1)多源数据集成;(2)数据处理与分析;(3)地图产品生成。
The major purpose of this GIS-based software system is to make and release standardized maps using multiple source data acquired or derived before and during the rover missions. It has three modules: (1) multi-source data integration, (2) data processing and analysis, and (3) cartographic product generation.
“未来的月球和火星探测器任务可能需要在更具挑战性的地形上着陆,在一个导航单元内穿越更长的距离,在一定程度上获得更科学的数据,等等。
为了满足这些新的要求,需要扩展相关的地理空间技术,开发新的技术,不仅要提高精度、鲁棒性和车载实时处理能力,还要提高月球车的智能性。
Future lunar and Mars rover missions may require landing in more challenging terrain, traversing longer distance within one navigation unit, acquiring more scientific data with a certain level of autonomy, etc.
To meet such new requirements, the relevant geospatial technologies need to be expended and new technologies need to be developed not only to improve accuracy, robustness, and on-board real-time processing capability but also to increase the intelligence of the rover.
文章图表
Figure 1. Photos of the CE-3 and CE-4 rovers on the lunar surface taken by the landers.
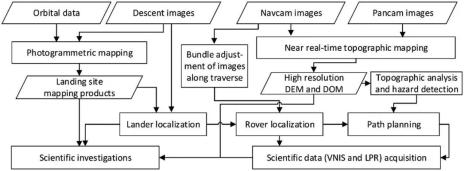
图2显示了在CE-3和CE-4任务中开发和应用的地理空间技术的技术框架。在着陆器和探测器发射前,使用轨道图像进行摄影测量制图,以便对着陆点进行一般地形分析。测绘产品包括DEM和DOM,以及一些衍生产品,如坡度图和等高线图。轨道DOM被用作基线图,以支持着陆器的定位,在着陆后很快(例如30分钟内)完成定位。在地面作业期间,详细的地形测绘和月球车定位将在地球控制中心(即BACC)进行,即在月球车图像被下行链路几分钟后进行。
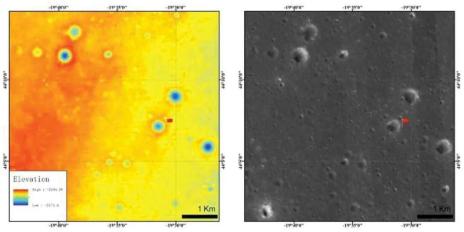
图3显示了由NAOC小组0236号轨道的1.5 m分辨率CE-2立体图像生成的CE-3着陆场的4 m分辨率DEM和1.5 m分辨率的DOM。地图在墨卡托投影中绘制;高程值与半径为1737.4 km的参考球体有关,红旗表示CE-3着陆器的位置。
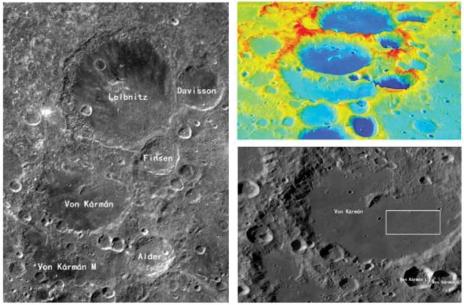
图4显示了CE-4着陆场和周围区域的图像和地形。预选着陆点(图4右下角白框)位于冯卡曼陨石坑东南部,覆盖范围为(176.4°E~178.8°E,45.0°S~46.0°S),约52 km×30 km。CE-2dom和LROC-WAC镶嵌体的分辨率分别为7m和100m。SLDEM2005在该区域的分辨率约为42m;着陆场区域在该尺度上通常是平坦的。
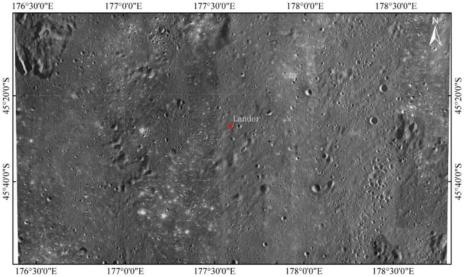
Figure 5. LROC NAC DOM mosaic of CE-4 landing site with a resolution of 0.9 m (Liu, Di, Li 2019).
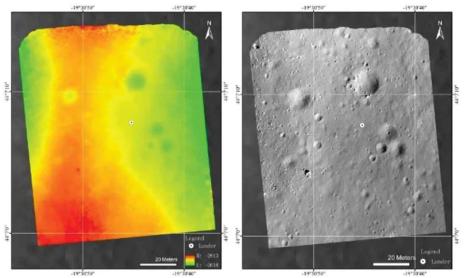
Figure 6. CE-3 landing site DEM and DOM (0.05-m resolution) generated from descent images (Liu, Di, and Peng 2015).
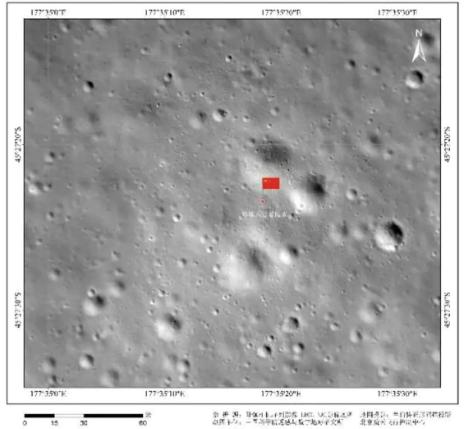
Figure 7. CE-4 landing site DOM (0.03-m resolution) generated from descent images (Di, Liu, and Liu 2019c).
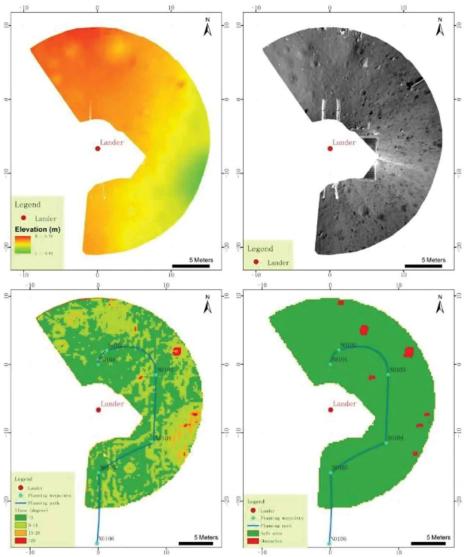
图8显示了CE-3着陆器位置的DEM和DOM,以及进一步导出的坡度图和障碍物图。在制作坡度图时,将DEM下采样至0.2 m分辨率,并通过3×3单元邻域z值的局部平面拟合获得坡度值;随后考虑坡度和高差约束,生成障碍物地图(Liu,Di,Peng 2015)。
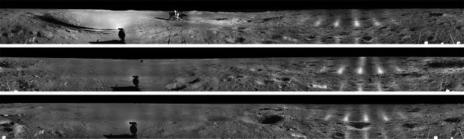
Figure 9. The 360° Pancam image mosaics generated from left-eye images taken by Yutu-2 rover at three locations.
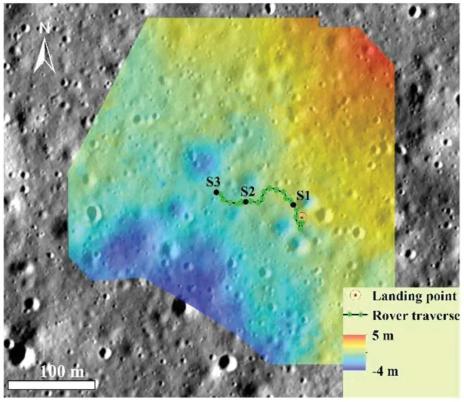
Figure 10. DEM of CE-4 landing site derived from Pancam images taken at three locations (black dots)
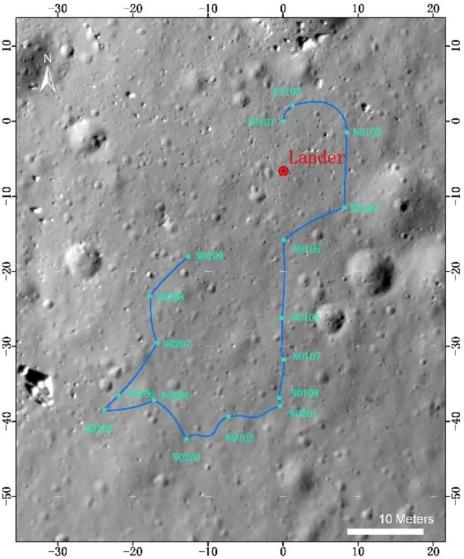
Figure 11. Yutu rover traverse map.
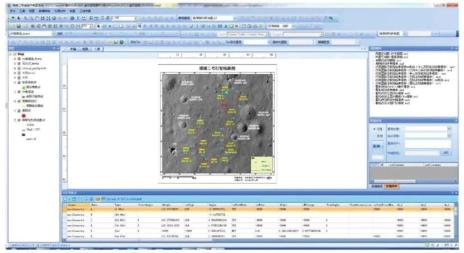
Figure 12. Main interface of the digital cartography system for supporting rover teleoperation.
致谢
感谢北京航天控制中心在嫦娥三号和嫦娥四号飞行任务期间给予的支持和密切合作。感谢中国国家航天局提供嫦娥三号和嫦娥四号数据,感谢国家天文台月球与深空探测科学应用中心提供嫦娥二号DOM和DEM。我们也要感谢那些在行星数据系统档案中工作的人,感谢他们提供了LROC图像和SLDEM2015,感谢亚利桑那州立大学提供了LROC WAC镶嵌图。
来源:地球空间信息科学学报GSIS
原标题:《GSIS特邀论文 | 嫦娥三号和嫦娥四号月球车任务的地理空间技术》